2019年5月26日~29日、札幌で開催されたThe IEEE International Symposium on Circuits and Systems (ISCAS 2019) において、生命体工学研究科 森江研究室、田向研究室の下記の研究発表が、”Best Live Demonstration Award”に選ばれました。
ISCASはIEEEが主催する回路とシステムの分野で世界最大のフラグシップ国際学会です。今年で51回目の開催を数える歴史ある学会で、1,000名以上の研究者が世界中から札幌へと集結しました。なお、日本での開催はISCAS2005 の神戸以来です。
Live demonstration session では、世界中から集結した31の研究グループが研究成果の実物を展示し、半日のデモンストレーションを通してその成果を発表しました。
受賞対象となった研究成果は、ロボットの知的処理への応用を目指した超低消費電力積和演算(TACT)チップです。TACTチップは、ロボットの知能実現に必要不可欠なニューラルネットワークの積和演算を大幅に効率化するものです。現在、世界中で人工知能(AI)を実行する高性能チップの開発が盛んで、今回の国際会議でも多くの発表がありましたが、それら最先端のディジタルAIチップに比べて、本チップはアナログ動作を活用することで10倍以上の電力効率(低消費電力化)が実現できることが示されています。
Live demonstration では、TOYOTA HSR ロボット の視覚処理にTACTチップを応用し、ロボットの前方にいる人を検出して追跡するFollow meタスクを披露しました。約4時間のデモンストレーションで、TACTチップ、ロボット共に順調に動作し、200名以上の来客に直接デモを通して研究成果を説明しました。
本研究発表は、ニューラルネットワークのための時間領域での積和演算方式、専用脳型チップの設計、ロボットへの応用という広範な領域をカバーするもので、学際研究を追求する生命体工学研究科ならではの、世界的にも類を見ない非常にユニークな取り組みであり、その成果が本受賞につながりました。
なお、本研究は、国立開発法人新エネルギー・産業技術総合開発機構(NEDO)の委託業務の結果得られたものです。

受賞チーム:発表者とHSRロボット集合写真

Best Live Demonstration Award賞状

授賞式の様子
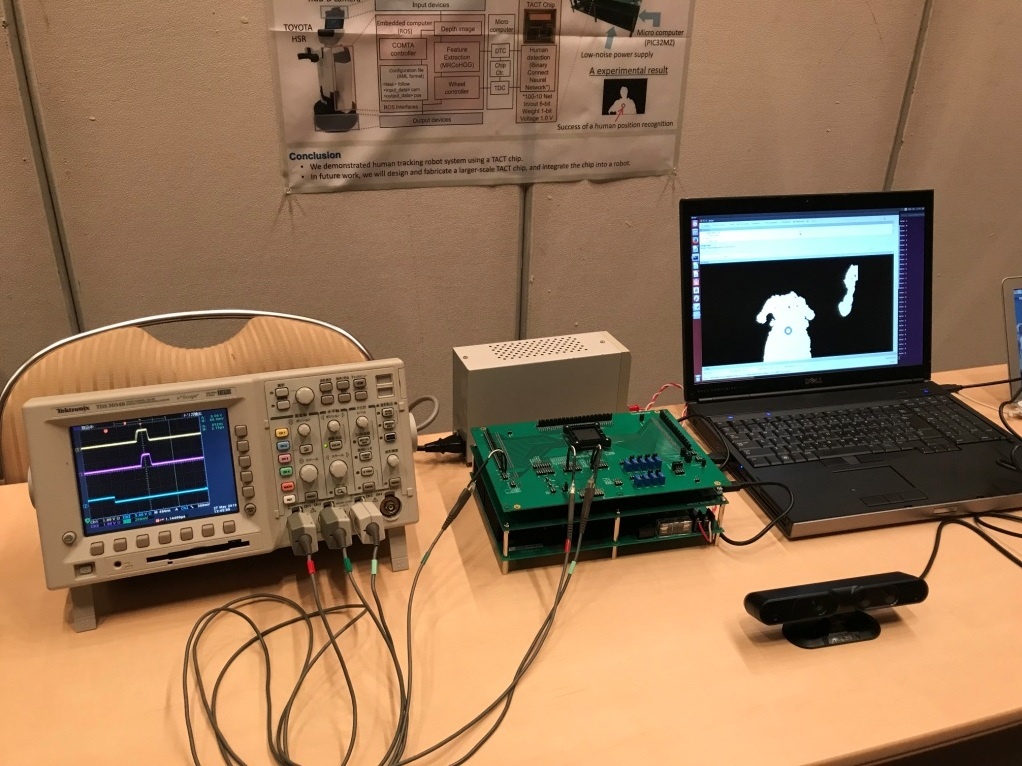
TACTチップによる人物検出の様子

TACTチップを搭載したHSRロボット
Masatoshi Yamaguchi, Gouki Iwamoto, Yushi Abe, Yuichiro Tanaka, Yutaro Ishida, Hakaru Tamukoh and Takashi Morie,
“Live Demonstration: a VLSI implementation of time-domain analog weighted-sum calculation model for intelligent processing on robots,”
IEEE International Symposium on Circuit and Systems (ISCAS2019), Paper ID 2353, Sapporo, Japan, May 27th, 2019.