2026年4月24日〜27日 、滋賀ダイハツアリーナにて「ロボカップジャパンオープン2026」が開催され、九州工業大学大学院生命体工学研究科および北九州市立大学の学生を中心に結成しているチーム「Hibikino-Musashi@Home」(主指導教員: 大学院生命体工学研究科 田向 権教授)が、@ホームリーグのDomestic Standard Platform League (DSPL)およびSimulation Open Platform League (S-OPL)のOpen Challengeで優勝しました。
ロボカップは、自律移動型ロボットによる競技会です。中でも@ホームリーグは、キッチンやリビングなどの日常生活空間で、人間の生活を支援するロボットの開発を目標としたリーグです。Hibikino-Musashi@Homeは、標準機「TOYOTA HSR」を用いるDSPLと、シミュレータ「SIGVerse」を用いるS-OPLに出場しました。
ロボカップジャパンオープン2026 結果詳細
● Domestic Standard Platform League (DSPL)
< 本競技 >
HSRのモーターを高速化した試験機「魔改造HSR」を用いて、2026年6月末に予定されている世界大会と同様のルールでタスクに挑戦して、2位を収めました。競技では、家庭環境を模したフィールドにおいて、以下の5つのタスクに取り組みました。
1. Human Robot Interaction Challenge:来客応対
2. Pick and Place Challenge: 物体の片付けなどを行う
3. Restaurant Challenge:未知環境において客の注文を聞き、品物を届ける
4. Enhanced General Purpose Service Robot Challenge: 自然言語を理解し、多様な依頼への対応
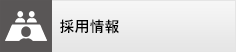
5. Doing Laundry Challenge:洗濯物の取り込みや、折りたたむ作業を行う
特にDoing Laundry Challengeでは、出場チームで唯一、洗濯物を折りたたむ動作を実行しました。単腕のロボットでありながら、洗濯物を半分に折りたたむ動作に成功した一方で、仕上がりの精度など今後の課題も明らかとなりました。
< Open Challenge >
リザバーコンピューティングを活用した雑音除去および話者推定のデモンストレーションを実施しました。リアルタイムでの音声処理デモンストレーションや、「レストランに新入りのロボットが来た」という設定での実演などが高く評価され、優勝(6チーム中1位)しました。
● Simulation Open Platform League (S-OPL)
< 本競技 >
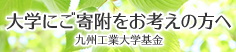
VR空間上のシミュレータ「SIGVerse」を用い、人とロボットの相互作用を評価する、以下の3つのタスクに取り組みました。
1. Handyman: 人から言葉で頼まれた物体を、指定の場所へ運ぶ
2. Interactive Cleanup: 人が指差した物体を片付ける
3. Human Navigation: ロボットが人を特定の物体の場所まで案内する
3タスク中の2タスクで1位を獲得、その結果、2位を収めました。本年度は、競技システムが実機と同じ制御システム(Robot Operation System 2 Humble)へ刷新されました。今後は、シミュレータ上で得られた知見を実機ロボットへ展開し、検証することを目指します。
< Open Challenge >
複数の飲み物が存在する環境で「飲み物を持ってきて』という曖昧な指示に対し、ロボットが適切な質問を行い対象物を特定するシステムを開発し、ポスター発表およびシミュレータを用いたデモンストレーションを行い、優勝(3チーム中1位)しました。
Hibikino-Musashi@Home 概要
Hibikino-Musashi@Homeは「人間と共存可能な家庭用サービスロボットの実現」を目標にロボットの開発に取り組んでいる学生プロジェクトのチームです。ロボットはコンピュータサイエンス、人工知能、ロボット工学をはじめとする工学分野の成果の集大成です。本大会に出場したロボットには、Hibikino-Musashi@Homeの研究開発の成果はもちろん、チームに所属している大学院生命体工学研究科の多様なバックグラウンドを持つメンバーの研究成果が実装されているほか、ニューロモルフィックAIハードウェア研究センターの分野横断の研究開発がロボット応用の出口へと結びつき、日々、その性能を進歩させています。また、田向研究室はフィジカルAIの実現に向け、AIロボット協会が中心となり進めているロボット基盤モデル構築プロジェクトにも参画しています。
Hibikino-Musashi@Homeは、2025年にブラジルで開催された世界大会「ロボカップ2025」で優勝し、2024年大会に続く2連覇を達成するなど、世界の強豪チームとして広く認知されています。厳しい事前審査を通過し、今年6月に韓国・仁川で開催される世界大会「RoboCup2026」への出場も決定しています。今後、益々の活躍にご注目ください。
| 【世界大会】RoboCup | 開催国 | 結果 |
|---|---|---|
| RoboCup 2025 | ブラジル (Salvador) | 優勝 |
| RoboCup 2024 | オランダ (Eindhove) | 優勝 |
| RoboCup 2023 | フランス (Bordeaux) | 準優勝 |
| RoboCup 2022 | タイ (Bangkok) | 3位入賞 |
| RoboCup 2021 | オンライン | 準優勝 |
| RoboCup 2020 | 中止 | - |
| RoboCup 2019 | オーストラリア | 3位入賞 |
| RoboCup 2018 | カナダ | 優勝 |
| RoboCup 2017 | 日本 | 優勝 |
◇上記ほか、日本大会を含むすべてのHibikino-Musashi@Homeの成績はこちら。
Hibikino-Musashi@Homeは、学生プロジェクトや、カーロボAI連携大学院より支援を受けております。九工大では、同窓会である明専会や企業と連携し、学生グループによる創造的なプロジェクトに対し、その活動を強力にサポートしています。また、この成果の一部は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の委託業務(JPNP16007)の結果得られたものです。
◇ロボカップジャパン2026についてはこちら。
◇Hibikino-Musashi@Home公式ウェブサイトはこちら。
◇Hibikino-Musashi@HomeのXはこちら。
◇ニューロモルフィックAIハードウェア研究センターについてはこちら。

DSPL - Human Robot Interactionチャレンジ

DSPL - Restaurantチャレンジ
DSPL - Doing Laundrチャレンジ
S-OPL - Interactive Cleanupタスク
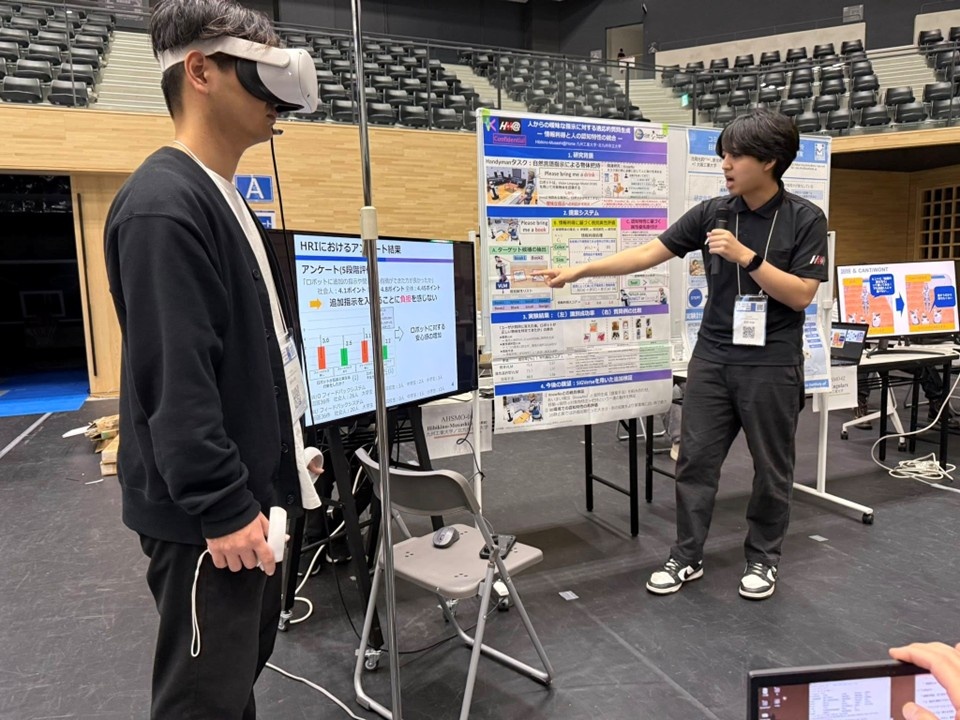
S-OPL - Open Challenge

チーム集合写真
DSPL 本競技2位
DSPL Open Challenge 1位

S-OPL 本競技2位

S-OPL Open Challenge 1位