パーキンソン病の歩⾏障害をウェアラブルデバイス×AIで緩和
~ 情報共有ウェブサイト「ホコラボ」を公開しました ~
国立大学法人九州工業大学は、内閣府の戦略的イノベーション創造プログラム(SIP)第3期「バーチャルエコノミー拡大に向けた基盤技術・ルールの整備/体性感覚・聴覚インタラクションに基づく運動支援プラットフォームの構築とパーキンソン病患者の歩行障害緩和のための活用」の採択事業者である産業技術総合研究所・令和健康科学大学・慶應義塾大学・株式会社ORPHEと共に、本プロジェクトの研究開発成果や活発な情報共有を目的としたウェブサイト「ホコラボ」を公開しました。
本ウェブサイトは、”Walking with Parkinson’s, Creating Together” –パーキンソン病とともに歩く社会を、ともに創り出す。– をビジョンに掲げ、単なる情報発信のみでなく、当事者‧家族‧医療介護‧地域‧企業とつながり、意見を集めながらともに良いものを作り出せるコミュニティとなることを目指します。
- 「ホコラボ」サイト URL : https://hocolab-pd.orphe.io/
ホコラボのロゴ
本プロジェクトは、パーキンソン病(Parkinson’s disease:PD)と共に生きる社会の実現に向け、体性感覚‧聴覚インタラクションに基づく運動支援プラットフォームの研究開発から社会実装までを一体的に推進する取り組みです。
■背景・課題:「PDパンデミック」と社会的課題
パーキンソン病は、患者数の増加が急速に進む神経変性疾患であり、2040年には世界で約1,300万人に達すると推定されています(Dorsey & Bloem, JAMA Neurol. 2018)この状況は「PDパンデミック」とも呼ばれ、国際的な社会課題となっています。特に、すくみ足、小刻み歩行、突進歩行といった歩行障害は、転倒‧転落のリスクを高め、寝たきりになる主な要因となります。さらに、症状には日内変動があるため、医療機関外の日常生活において継続的に活用できる支援システムの必要性が高まっています。
■SIP第3期採択プロジェクト概要
| 事業名 | 内閣府 総合科学技術・イノベーション会議の定める「戦略的イノベーション創造プログラム(SIP)第3期/バーチャルエコノミー拡大に向けた基盤技術・ルールの整備」
(研究推進法人:国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)) |
| 委託件名 | 体性感覚・聴覚インタラクションに基づく運動支援プラットフォームの構築とパーキンソン病患者の歩行障害緩和のための活用 |
| 実施期間 | 2023年9月28日~2026年3月31日 |
| 参画機関
(委託事業者) |
国立研究開発法人産業技術総合研究所
‒実施項目①:スマートシューズによる歩行障害計測技術の研究開発 ‒実施項目②:神経筋骨格モデルによる介入効果予測技術の研究開発 国立大学法人九州工業大学 ‒実施項目③:体性感覚 (人工筋肉・モータ) による介入技術の研究開発 学校法人慶應義塾 ‒実施項目④:聴覚 (音楽) による介入技術の研究開発 学校法人令和健康科学大学(クリオ訪問看護リハビリステーション) ‒実施項目⑤:システムの性能・運用性・受容性評価に関する研究開発 株式会社ORPHE ‒実施項目①:スマートシューズによる歩行障害計測技術の研究開発 |
| 協力機関 | ピュア・クリオ(訪問介護、通所介護・サービス展開検討/実証支援)
Dot cue(訪問介護、サービス展開検討/実証支援) ダイヤ工業株式会社(アシストスーツ・人工筋肉開発) ローランド株式会社(音源提供/音楽技術支援) |
■「ホコラボ」プロジェクト概要
(1) 目的
このプロジェクトは「バーチャルエコノミー拡大に向けた基盤技術・ルールの整備」の一環として、「体性感覚・聴覚インタラクションに基づく運動支援プラットフォームの構築とパーキンソン病患者の歩行障害緩和のための活用」を目的としています。この技術の中核を成すのは「インタバース」という概念です。インタバースは以下の要素を持つと説明されています。
● ユニバース(私たちの生活する実世界)とメタバース(あなたを理解する仮想空間)を接続するためのインタフェース技術。
● メタバース上での様々な条件におけるシミュレーションに基づき、最適解を導出するための数値解析技術。
● インタバース上に、パーキンソン病(PD)患者の神経筋骨格系を再現したデジタルツインが基軸として構築されます。これにより、歩行障害の発生機序の研究や、タイプに応じた有効な介入方法の予測が可能になります。
(2)ビジョン:”Walking with Parkinson’s, Creating Together” –パーキンソン病とともに歩く社会を、ともに創り出す。
ホコラボプロジェクトの理念は、PDと向き合う毎日を“「病と共に生きる」: “Walking with Parkinson’s,”という価値観で捉え直す点にあります。パーキンソン病とともに歩む社会の実現がその使命です。情報サイト「ホコラボ」は、単なる情報発信にとどまらず、当事者・家族・医療介護関係者・地域・企業とつながり、意見を集めながら共創するコミュニティの形成を目指します。
● 「歩行に不安があっても自分らしく暮らせる」社会の実現。
● 運動支援を通じたウェルビーイングの実現。
● すべての人が「自分らしい一歩」を踏み出せる社会の実現。
● 技術開発にとどまらず、文化・社会の形成。

ホコラボプロジェクトの理念
(3)プラットフォームを支える3つの技術紹介
| ①歩行障害計測技術 | スマートシューズ |
| 機 能 | シューズに取り付けられた小型センサで、日常生活内における歩幅や足の高さなどの歩きの特徴、さらにはPD患者特有の「すくみ足」や「小刻み歩行」といった歩行障害を検出・計測します。 |
| 参考論文 | Uno Y, et al., Sensors (Basel). 2022; doi:10.3390/s23010331 |

Orpheのスマートシューズ
| ②介入効果予測技術 | 神経筋骨格モデル |
| 機 能 | 神経‧筋・骨格を統合したモデルにより歩行障害を再現。コンピュータシミュレーションを通じて、個別化介入の有効性を予測します。 |
| 参考論文 | Ichimura D, Sawada M, et al., J Neuroeng Rehabil. 2025; doi:10.1186/s12984-025-01596-x |

神経筋⾻格モデル
| ③最適感覚介入技術 | 体性感覚・聴覚インタラクション |
| 機 能 | アシストスーツ、歩行器、音楽介入システムが、スマートシューズやモデルシミュレーション結果と連動し、歩行を補助します。 |
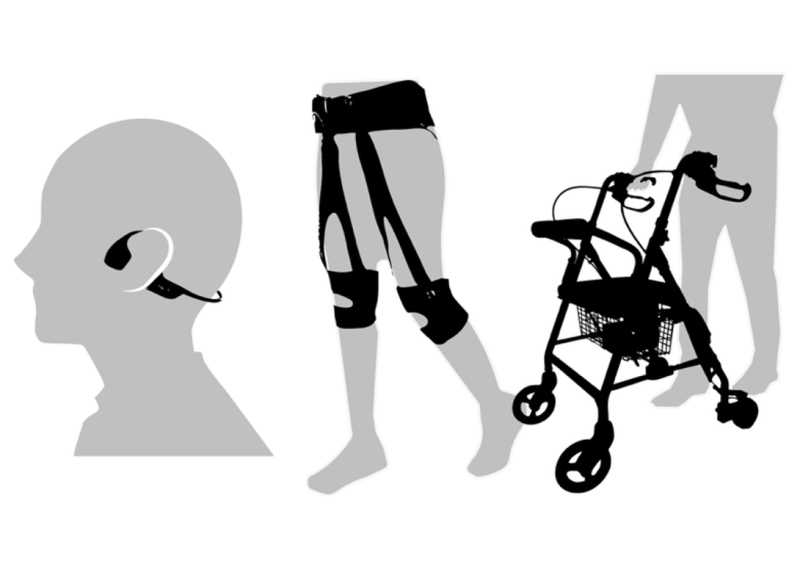
体性感覚‧聴覚インタラクション
■今後について
SIP支援期間後(2028年3月)には、訪問看護事業者と連携したサービスとして、以下の3つのサービスを社会実装することを目指します。
● 不活動予防サービス : スマートシューズによる活動データ計測と生活中の活動量維持サポート。
● 生活モニタリングサービス : 周囲の環境も含めた日常生活のモニタリングと環境改善サポート。
● 歩行障害緩和サービス : アシストスーツや音・音楽を用いた個別化された歩行サポート。
■九州工業大学の役割について
九州工業大学では、大学院生命体工学研究科人間知能システム工学専攻柴田智広研究室が本プロジェクトに参加し、これまで培ってきた支援ロボティクス技術をもとに、個人適応型歩行器の技術開発を行います。本プロジェクトでは、他機関と連携しながら実社会で活用される支援装置となることを目指して研究開発を推進していきます。
国立大学法人九州工業大学
大学院生命体工学研究科人間知能システム工学専攻 教授 柴田智広
私たちはこれまで、支援ロボティクスの研究を通じて、“人の意図や状態に寄り添いながら行動を支える技術”の実現を目指してきました。本プロジェクトでは、スマートシューズによる日常データ、神経筋骨格モデルによる理解、そして身体感覚・聴覚を活用した介入技術を統合することで、パーキンソン病とともに生きる方々の歩行を継続的に支援する新しい運動支援基盤の構築に挑戦しています。重要なのは、単なる機器開発ではなく、実社会の生活環境の中で自然に使われ続ける仕組みを共創することです。産学官および当事者の皆様との連携を通じて、“歩くこと”が再び自信や希望につながる社会の実現に貢献してまいります。
【お問い合わせ】
(「ホコラボ」に関するお問い合わせ)
国立大学法人九州工業大学
社会実装本部未来思考実証センター
研究職員 山﨑 駆
お問い合わせフォーム:
https://hocolab-pd.orphe.io/contact (外部サイト:ホコラボ)
(報道に関するお問い合わせ)
国立大学法人九州工業大学
管理本部総務課広報係
E-mail:pr-kouhou*jimu.kyutech.ac.jp
(メールは*を@に変えてお送りください)