更新日:2019.01.25
アリロボットの群れを「飼いならす」
-生物の複雑適応システムの進化機序に新たな規則を発見-
京都大学大学院農学研究科 土畑重人 助教、九州工業大学大学院情報工学研究院 藤澤隆介 准教授、静岡大学学術院工学領域 一ノ瀬元喜 准教授は、アリの集団採餌を模倣した群ロボットシステムを用いることで、自己組織化を伴う複雑適応システムが進化する際に、システムを補助する性質がシステムそのものに先立って生じるという、一見矛盾した規則が存在することを発見しました。
本研究は、複雑でありながらも適応性を兼ね備えるという、生物システムが共通して示す特性が進化の過程でどのように生じたのかについての新規な理論枠組を提示するものです。また、本研究で用いた手法は、ロボットシステムを生物学の研究補助ツールとしてではなく、研究対象そのものとして活用するというものです。これは「ロボット行動学」とも呼ぶべき、分野横断型研究の新たなモデルケースとなることが期待されます。
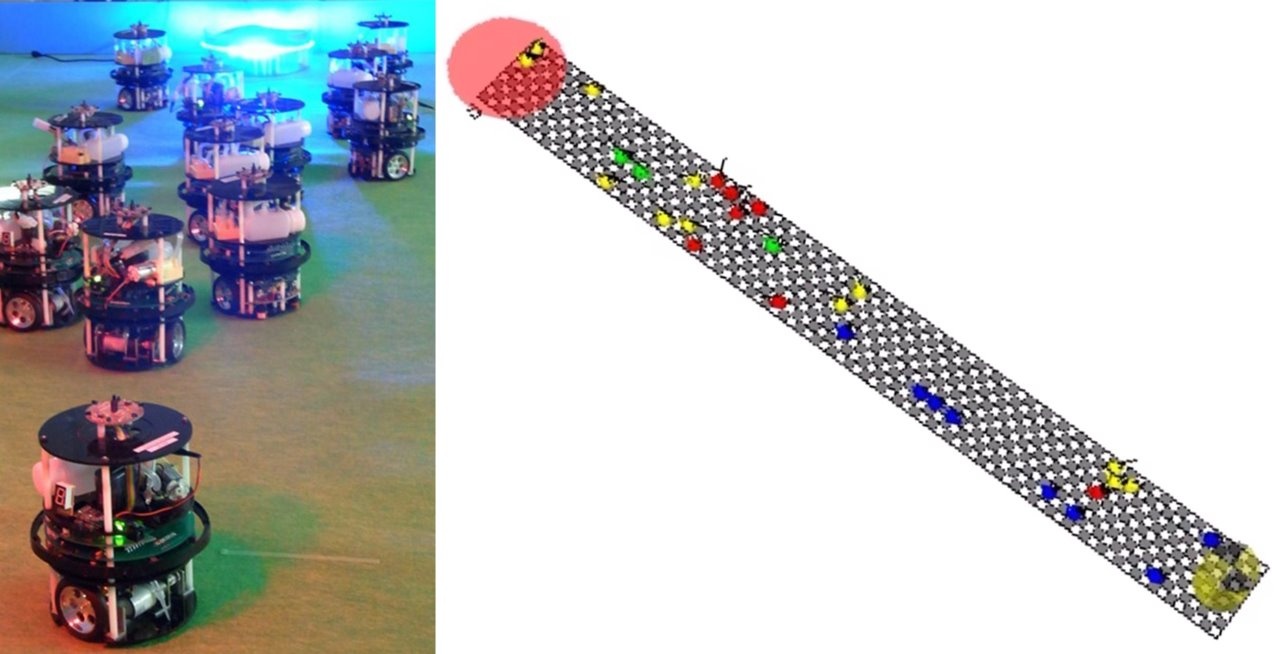
本研究で用いた群ロボットシステムARGOS(左)と、計算機上でのシミュレーションの様子(右)
◇本研究成果は、2019年1月18日に、 英国のオンライン科学誌「Communications Biology」に掲載されました。
◇詳細はこちらから(プレスリリース本文)
【お問い合わせ先】
国立大学法人九州工業大学 総務課広報企画係
TEL:093-884-3007
E-mail:sou-kouhou*jimu.kyutech.ac.jp
(*を@に置き換えてお送りください)